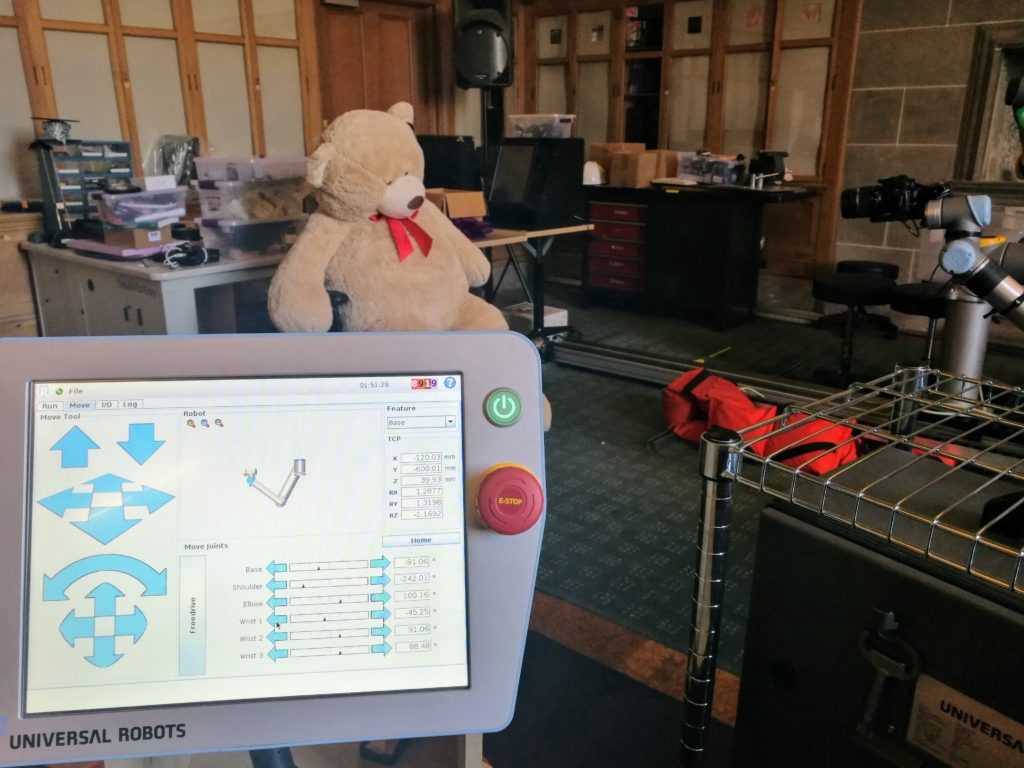
A new series of Human-Machine portraits shot with a robot arm and human sitter. For each portrait we shoot a grid of 36 photos using a robotic arm for camera positioning. This video shows computational refocusing on one single light field data set. This was shot with a UR10 Robot Arm and zcam E1 at Carnegie Mellon University. Thanks Eunsu Kang for being a willing volunteer!
This project was developed as a Artist in Residence at the STUDIO for Creative Inquiry.
Process Example with Bear